
PID control is one of the most commonly used closed-loop control mechanisms in industrial control systems. PID controllers work great when applied and configured correctly, and they are often viewed as a sort of magic box that can solve any process control problem. To successfully apply and tune these controllers, it is important to understand how they work, the math behind them, and the nuances of the specific implementation by various manufacturers. This post provides an intuitive look at how a PID works before getting into the math.
PID PARAMETER DEFINITIONS
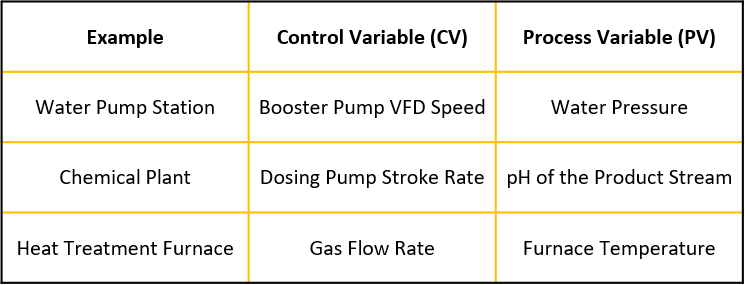
PID stands for Proportional-Integral-Derivative (PID) and consists of three parameters P, I, and D which control your process. PID controllers can be applied whether you are pumping water, processing chemicals in a plant, or controlling temperature in a furnace. One parameter is controlled (varied) to maintain another parameter at a desired value. For example, pump speed is controlled to maintain pressure, valve position is controlled to maintain flow, and fuel feed rate is controlled to maintain temperature. Now it is time for some formal names:
- The parameter that is controlled is the Control Variable (CV)
- The parameter that reacts to a Control Variable change is the Process Variable (PV)
- The target value for PV is the Setpoint (SP)
Ideally the PV should change in a predictable fashion with a change in CV but in a real-world situation the load or demand will not be constant thereby altering the relation between CV and PV. The CV has to be changed by a larger amount during peak load compared to off-peak periods in order to change the PV by the same amount.
Proportional
Imagine you are driving down a street and see an increase in the posted speed. Woohoo! Time to step on the gas pedal. The higher the posted speed, the harder you will step on the pedal. Of course, you could choose to not push hard but then it will take longer to get to that higher speed. As you start closing in on the speed limit, you are going to ease back on the pedal. If you leave your foot in exactly the same position, then you will end up either speeding (overshooting) or going under the limit (undershooting). This is the Proportional Control in a PID loop. Of course, you would make small adjustments with your foot as you get closer to the speed limit, and that’s where the real magic of PID happens.
Integral
Now imagine you are driving with a friend whose sole purpose in life is to keep reminding you that you are below the speed limit. You succumb to the nagging and slowly increase the force on the gas pedal. You would continue doing so as long as your friend remembers that you are below the speed limit. And that forms the basis of the second part of the PID loop called the Integral Control. This ensures that your car reaches the posted speed faster and stays there.
Derivative
Let’s make the analogy little more interesting and now you are driving with your mom who still thinks you are a child and every time you push on the gas pedal, she concludes that you are going to continue pushing harder and end up dying in a car crash!! What she is doing is looking at your current action, predicting the future and asking you to take corrective action before the future happens. And that’s how Derivative Control works.
Summary
To summarize, a PID Loop controls a process based on three questions:
- What is the current difference between where you are and where you have to be?
- For how long have you been off the target?
- If any action taken is left unchecked then how will it impact the process in the future?
Or in math-speak:
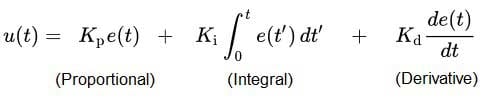
Hopefully you now have a basic understanding of the components of a PID Loop and how it works. In the next blog post I will give you some practical tips on tuning PID loops and what adjustments to make when you see a certain type of PV response.
Want more? Check out part 2 of this blog where we explore the role played by each term using simplified examples and basic arithmetic.
This blog was originally published on January 30, 2018 and last updated January 22, 2020.
COMMENTS